
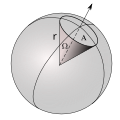
In mathematics, the axis–angle representation parameterizes a rotation in a three-dimensional Euclidean space by two quantities: a unit vector e indicating...
15 KB (2,117 words) - 22:30, 27 November 2024

Rotation (redirect from Axis of rotation)
possible axes and angles of rotation, including chaotic rotation (between arbitrary orientations), in contrast to rotation around a fixed axis. The special...
29 KB (4,090 words) - 01:23, 24 April 2025
prescribed by the right-hand rule. The rotation axis is sometimes called the Euler axis. The axis–angle representation is predicated on Euler's rotation theorem...
19 KB (3,177 words) - 20:58, 20 November 2024
space. Specifically, they encode information about an axis-angle rotation about an arbitrary axis. Rotation and orientation quaternions have applications...
68 KB (11,740 words) - 13:02, 24 April 2025

Orientation (geometry) (section Euler angles)
single rotation around a fixed axis. This gives one common way of representing the orientation using an axis–angle representation. Other widely used methods...
12 KB (1,348 words) - 20:34, 16 February 2025

used as part of the representation of a more complicated object's orientation in physical space (e.g., axis–angle representation). Two directions are...
5 KB (543 words) - 15:40, 17 January 2025
There are several methods to compute the axis and angle from a rotation matrix (see also axis–angle representation). Here, we only describe the method based...
102 KB (15,724 words) - 16:17, 7 May 2025
matrix in SO(3), the group of all rotation matrices, from an axis–angle representation. In terms of Lie theory, the Rodrigues' formula provides an algorithm...
15 KB (2,166 words) - 23:08, 3 January 2025
Versor (section Representation of SO(3))
3-dimensional rotation has the angle 2a about the axis r in axis–angle representation. In case a = π/2 (a right angle), then q = r {\displaystyle q=\mathbf...
22 KB (2,933 words) - 08:45, 20 March 2025

[citation needed] 3D projection Rotation Axis-angle representation Conversion between quaternions and Euler angles Davenport chained rotations Euler's rotation...
48 KB (5,168 words) - 03:51, 15 March 2025

Spherical coordinate system (redirect from Angle of elevation)
called the origin; the polar angle θ between this radial line and a given polar axis; and the azimuthal angle φ, which is the angle of rotation of the radial...
43 KB (6,358 words) - 20:55, 14 April 2025
this article the axis-angle representation is used for ρ. The rotation is about an axis in the direction of a unit vector e, through angle θ (positive anticlockwise...
106 KB (14,794 words) - 12:39, 24 April 2025
Rotation formalisms in three dimensions (redirect from Rotation representation)
eigenvalues. The angle θ which appears in the eigenvalue expression corresponds to the angle of the Euler axis and angle representation. The eigenvector...
56 KB (9,999 words) - 16:42, 17 April 2025

axis–angle representation of rotations, the quaternion and dual quaternion representations of rotations and translations, the plücker representation of...
36 KB (4,361 words) - 21:03, 12 March 2025

for rotations about a fixed point. Axis–angle representation (pictured at the right) specifies an angle with the axis about which the rotation takes place...
24 KB (3,129 words) - 00:52, 19 November 2024

Multiview orthographic projection (redirect from First-angle projection)
relative to each other according to either of two schemes: first-angle or third-angle projection. In each, the appearances of views may be thought of as...
24 KB (3,180 words) - 19:55, 21 March 2025

Rigid body dynamics (section Euler angles)
similar method, called axis-angle representation, describes a rotation or orientation using a unit vector aligned with the rotation axis, and a separate value...
43 KB (5,761 words) - 08:36, 24 April 2025
vectors, homogeneous transformations, roll-pitch-yaw and Euler angles, axis-angle representation, unit-quaternions, and twists, which are necessary to represent...
6 KB (616 words) - 07:14, 8 January 2025

The axis of rotation is known as an Euler axis, typically represented by a unit vector ê. Its product by the rotation angle is known as an axis-angle vector...
30 KB (4,497 words) - 18:43, 22 April 2025
of the magic angle is half of the opening angle formed when a cube is rotated from its space diagonal axis, which may be represented as arccos −1/3...
7 KB (849 words) - 20:27, 17 January 2025
article the axis-angle representation is used, and θ = θe is the "axis-angle vector", the angle θ multiplied by a unit vector e parallel to the axis. Also,...
45 KB (6,413 words) - 00:42, 8 February 2025

Fig. 3-2: the x-axis is drawn perpendicular to the ct′-axis, the x′ and ct-axes are added at angle φ; and the x′-axis is drawn at angle θ with respect...
49 KB (6,178 words) - 14:42, 23 March 2025
about it; this is the axis angle representation of a rotation. The plane of rotation is the plane orthogonal to this axis, so the axis is a surface normal...
24 KB (3,575 words) - 20:24, 19 January 2025

about an axis perpendicular to the relative velocities; The rotation is given by is a 4×4 rotation matrix R in the axis–angle representation, and coordinate...
33 KB (4,713 words) - 04:08, 3 April 2025

that the horizontal x-axis, called the real axis, is formed by the real numbers, and the vertical y-axis, called the imaginary axis, is formed by the imaginary...
31 KB (4,502 words) - 23:12, 6 May 2025

Ellipse (section Inscribed angle theorem for circles)
}\right)} , and rotation angle θ {\displaystyle \theta } (the angle from the positive horizontal axis to the ellipse's major axis) using the formulae: A...
90 KB (16,568 words) - 16:05, 4 May 2025

The Axis powers, originally called the Rome–Berlin Axis and also Rome–Berlin–Tokyo Axis, was the military coalition which initiated World War II and fought...
183 KB (21,587 words) - 16:37, 4 May 2025
Misorientation (section Graphical representation)
angle, axis/angle, or Rodrigues vector space. Unit quaternions, while computationally convenient, do not lend themselves to graphical representation because...
9 KB (1,533 words) - 19:01, 5 August 2023
pole, only one half. The solid angle subtended by a segment of a spherical cap cut by a plane at angle γ from the cone's axis and passing through the cone's...
28 KB (4,227 words) - 17:59, 5 May 2025

\operatorname {\text{SO}} (3)\cong \mathbb {RP} ^{3}} (shown using the axis-angle representation). The proof uses known results in algebraic topology. The same...
27 KB (3,986 words) - 17:34, 4 April 2025