
 French
French Deutsch
DeutschАпаратура радіокерування моделями — Вікіпедія

Апаратура радіокерування моделями — це комплекс компонентів, що використовують для радіокерування моделями. Така апаратура належить до сфери технічної творчості (хобі), виробниками передбачене її використання тільки для аматорського та спортивного моделізму.
Складові[ред. | ред. код]
Принцип дії апаратури радіокерування істотно відрізняється від тих, що використовують для радіокерованих іграшок (дискретної дії). Модельна апаратура пропорційного радіокерування, діє таким чином, що кожен повільний рух ручки керування передавача, аналогічно повторюється важелем відповідної рульової машинки (виконавчий механізм) на борту моделі. Це означає що, пілот може плавно, з потрібною швидкістю і на будь-який кут повертати колеса, кермо повороту або висоти, а також змінювати оберти двигуна на моделях.
До складу системи керування входить:
- Передавач (пульт)
- Приймач
- Рульові машинки (сервоприводи)
- Акумулятори живлення (передавача, приймача), додатково зарядний пристрій передавача
Передавач[ред. | ред. код]

Передавач оснащений двома основними ручками (важелями) керування схожими на джойстик. Ручка рухається вільно в межах двох осей та приводять в рух два потенціометра, сигнали від яких передаються на борт моделі.
Залежно від кількості каналів передавача, ручки керування на пульті, мають одну або дві осі руху. Кожному напрямку руху ручки відповідає своя рульова машинка встановлена на борту моделі. Ручки керування (крім ручки газу для авіамоделей) підпружинені та мають нейтральне положення, від якого відпрацьовуються рухи вправо-вліво, вперед-назад. Для керування авто-, судомоделями і простими планерами достатньо двоканального передавача. Для авіамоделей необхідна трьох-чотириканальна, а для вертольотів, щонайменше, шестиканальна тільки зі спеціальними функціями.

Більш складні передавачі мають додаткові канали (загалом до 14), по яких команди подаються ручками з круговими або лінійним рухом або тумблером. Більшість сучасних передавачів, оснащені мікрокомп'ютером з дисплеєм, а в моделях вищого рівня можна зустріти великий кольоровий сенсорний дисплей і операційну систему Windows CE.
Такі комп'ютерні апаратури дають багато можливостей пілотові для налаштування різних авіа -, авто - та судномоделей. Насамперед вони містять готові програми для повноцінного налаштування планерів, пілотажних літаків, моделей з дельтоподібним крилом, V- подібним хвостовим оперенням, вертольотів та низку стандартних функцій, які пілот може змінювати залежно від особливостей моделі, та власних вподобань.
В комп'ютерних передавачах є можливість зберігати в пам'яті (в деяких передавачах пам'ять поміщає до кількох десятків моделей) вже налаштовані функції, положення тримерів для всіх моделей, та інші параметри. Всі ці дані відображаються на графічному дисплеї. Найновіші системи, що працюють в діапазоні 2,4 ГГц, мають функцію двонапрямленого зв’язку, що дає можливість отримувати телеметричні данні з борту моделі. Наприклад, температуру двигуна, стан заряду акумулятора, висоту польоту тощо.
Зазвичай апаратура забезпечує радіус дії більший, ніж відстань можливого візуального контакту пілота з моделлю (це близько 100 м). Системи керування, що працюють в діапазоні 2,4 ГГц забезпечують надійний зв’язок до 800 метрів по землі, та до 2000 м для літаючих моделей.
Типи та компонування[ред. | ред. код]
За зовнішнім компонуванням, передавачі бувають трьох типів: у вигляді підвісного великого пульта (т.з. «парта») ; компактного ручного пульта; пістолетного компонування. Підвісний пультовий передавач поширений переважно в Європі. При керуванні моделлю, його підвішують на ремінь за дві спеціальні металеві скоби, пілот тримає ручки управління двома (трьома) пальцями спираючись руками на передавач. Для більшої зручності такий передавач ще вставляють у спеціальну підставку-столик. Такі передавачі виготовляють фірми Grauper, Robe, Multiplex, Jeti.
Передавач виконаний у вигляді ручного пульта виглядає більш компактно, пілот може тримати такий передавач в руках та управляє джойстиками великими пальцями. Така манера керування більше поширена в США і Японії. Деякі пілоти підвішують такий передавач за допомогою ременя на шиї та керують ручками як пультовим передавачем.
Пістолетний варіант передавача призначений, переважно, для керування автомоделями, але їх з успіхом використовують і судомоделісти для швидкісних моделей. На ньому ручка керування поворотами, виконана у вигляді колеса, а ручка газу у вигляді гачка, який приводиться в рух вказівним пальцем. Така компоновка передавача визнана автомоделісти дуже зручною і стала дуже поширена. При керуванні, такий передавач тримають в лівій руці, а правою «кермують» колесоподібною ручкою. Пістолетні передавачі бувають також прості триканальні, та більш складні оснащені комп'ютером.
Для керування авіамоделями прийнято чотири варіанти розміщення каналів на ручках передавача. Ці варіанти називають mode 1, 2, 3, 4. Найбільш поширеним варіантами є mode 1 і mode 2. Варіант mode 1 умовно можна назвати американський а mode2 європейський. Кожен пілот вибирає зручний собі варіант з урахуванням зручності , звичок (напр. шульга), школи. В більшості передавачів (особливо комп'ютерних) є можливість встановити потрібний варіант «mode», але при покупці системи ,варто уточнити у продавця чи є така можливість, або який варіант керування у цього передавача.
Частоти[ред. | ред. код]
Є кілька прийнятих радіоапазонів, на яких працюють системи керування моделями. У Європі поширені основні діапазони частот 27 МГц, 35 МГц і 40 МГц, що часто зустрічаються апаратури на 72 МГц прийнятих в США та Азії. Кожен з цих діапазонів поділяється на свої канали, що дозволяє збільшити число одночасно працюючих передавачів. Канал задається змінним кварцовим резонатором певної робочої частоти в передавачі.
На сьогодні передача сигналу в МГц діапазоні вже майже не актуальна. Майже всі сучасні системи працюють в діапазоні частот 2,4 ГГц ,та не потребують окремих каналів, змінних кварців. Налаштування приймача на частоту свого передавача («прив’язка») робиться лише один раз перед початком подальшої експлуатації системи. Апаратура з частотою 2,4 ГГц значно краще захищена від радіоперешкод, та дозволяє одночасно працювати десяткам передавачів, не заважаючи один одному.
-
 Варіанти розміщення функцій на ручках передавача
Варіанти розміщення функцій на ручках передавача -
 Передавач виконаний у вигляді ручного пульта
Передавач виконаний у вигляді ручного пульта -
 Передавач пістолетного типу
Передавач пістолетного типу -
 7—канальний приймач діапазону 2,4 ГГц, та сервоприводи стандартного і «мікро» розмірів
7—канальний приймач діапазону 2,4 ГГц, та сервоприводи стандартного і «мікро» розмірів -
 8—канальний приймач МГц діапазону, та змінні кварци каналів
8—канальний приймач МГц діапазону, та змінні кварци каналів -
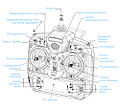 Приклад розміщення функцій на органах керування 6 канального передавача
Приклад розміщення функцій на органах керування 6 канального передавача




.jpg)

Приймач[ред. | ред. код]
Приймач радіосигналу встановлюється на моделі, до нього під’єднують виконавчі пристрої — сервомашинки, регулятори швидкості та ін.
Зазвичай приймачі виконані в пластмасовому корпусі, в якому знаходяться гнізда для підключення сервомашинок і кварца (в старих моделях). Кількість машинок які можна під’єднати , залежить від числа каналів приймача, яких може бути від двох і до чотирнадцяти. Приймачі мають власну антену: тонкий дріт завдовжки 30—100 см для МГц діапазону , та коротеньких «вусиків» у тих, що працюють в ГГц діапазоні. Мініатюрні приймачі (2—4 канала) для легких моделей, можуть бути без корпуса, лише вкриті прозорою плівкою.
Сервоприводи та контролери[ред. | ред. код]
На борту моделі встановлюють виконавчі механізми які перетворюють сигнал з передавача в певну дію. Основним таким компонентом є сервомашинка, вона виконує механічний рух для переміщення рульових поверхонь та механізмів авіамоделей, коліс автомобілів тощо.
Вони бувають різних розмірів , відрізняються зусиллям та швидкістю виконання команди. Важіль на валу сервоприводу відхиляється від центральної точки в обидва боки на 60 градусів. Кут відхилення можна запрограмувати з передавача експонентально, лінійно, асиметрично та інш. Існують сервоприводи з постійним обертанням вала, які використовують як лебідки на моделях яхт.
Для керування електромоторами використовують електронні регулятори обертів (контролери). Також існують електронні вимикачі для вмикання лампочок, світлодіодів, звукових сигналів тощо.
Історична довідка[ред. | ред. код]


Першим у світі, хто продемонстрував радіокеровані об`єкти, був видатний український вчений Пильчиков Микола Дмитрович. Це відбулося у м.Одесі 25 березня 1898 р. Він ще в ті часи використвував кодування і модуляцію переданих та частотну селекцію, демодуляцію, декодування прийнятих сигналів. Американський фізик Нікола Тесла представив у вересні 1898 року на електричній виставці в Нью-Йорку електричну модель човна з дистанційним радіокеруванням.[1]
В 1936 році німецькі аматори авіамоделізму Альфред Ліпітш та Егон Сікора[2] на гірському летовищі Wasserkuppe[de] продемонстрували перший в світі успішний політ радіокерованої моделі планера. Модель керувалась ламповим передавачем, виконувала розвороти та точне приземлення. Після 1936 року, використання приватними особами систем дистанційного керування моделями в Німеччині було заборонено нацистським урядом.
Подальший пріоритет в цій галузі змістився в США. Дистанційне керування моделями стало широко розвиватися після другої світової війни. Серійне виробництво апаратури вперше було організовано в США в 1948 р., це була одноканальна дискретна апаратура конструкції братів Гуд. Апаратура була ламповою і громіздкою.
Інтенсивний розвиток дискретної багатоканальної апаратури почався з робіт американця Роквуда в 1951 р., а в Європі — з 1954 р. В середині 1950—років були перші спроби застосування транзисторів, спочатку в приймачах сигналу. В 1958 в США з'явилися транзисторні супергетеродинні приймачі з числом команд до 10—12.
Апаратуру пропорційного керування стало можливим виробляти лише в 1960 р., а масове виробництво почалося в 1963 г, в США. З середини 1970— років проявились світові лідери виробництва надійних систем керування моделями Varioprop/Grundig (Німеччина); Futaba, та JR (Японія); Kraft в США.
Провідні фірми, що сьогодні виробляють апаратуру для керування моделями це: JR, Futaba, Hitec, Sanwa, Multiplex, Jeti. Світовими лідерами з них є японські фірми JR і Futaba.
В СРСР, вперше з середини 1950—років, на київському радіозаводі вироблялась шестикомандна апаратура для моделей :«Радиоуправляемый механизм РУМ-1». До 1958 року було вироблено 20000 комплектів такої апаратури.[3]
Див. також[ред. | ред. код]
Джерела та посилання[ред. | ред. код]
- Прфесійне обгововорення теми радіокерування [Архівовано 18 грудня 2015 у Wayback Machine.]
- Музей радіоапаратури для моделей США RC Hall of Fame [Архівовано 2 вересня 2019 у Wayback Machine.]
- Журнал «МОДЕЛІСТ» ISSN 18158161 , статті 5—6/2008, 1/2009
- Manfred-Dieter Kotting, Moderne Fernsteuerungen für RC-Flugmodelle: Empfänger, Servos, Zubehör. 2,4 GHz und 35/40 MHz, VTH Verlag Baden-Baden 2000, ISBN 978-3881807807
Примітки[ред. | ред. код]
- ↑ Tapan K. Sarkar, History of wireless, John Wiley and Sons, 2006 ISBN 0-471-71814-9 pages 276-278
- ↑ Fulda, COM.POSiTUM GmbH,. 1935 - 1950. www.segelflugmuseum.de. Процитовано 3 лютого 2016.[недоступне посилання з червня 2019]
- ↑ Дистанционное управление моделями. Войцеховский Я. — М.: Изд-во "Связь", 1977. — С. 9—16.